




▲机械鸵鸟设计者Jerry Pratt
说到腿足机器人,人们不约而同会想到波士顿动力的各款经典力作。
它们将平衡算法和传感器都运用到了极致,以惊人的平衡感行走在机器人圈。
然而,在大多数人争相追赶波士顿动力时,也的确有人特立独行。所以也就出现了我们今天的主角——
“Planar Elliptical Runner”
▼

中文名字呢 咳~咳 !
翻译过来叫“平面椭圆形运动器”!!!
好吧,虽然名字奇葩一点,但我觉得叫它“机械鸵鸟”或许更好听一些!
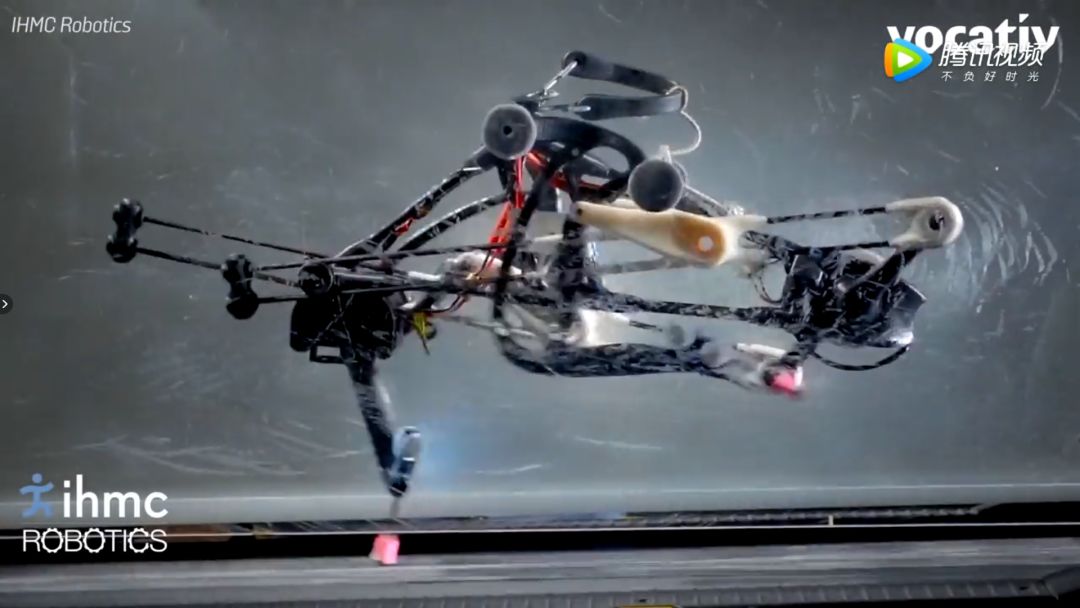
这架“机械鸵鸟”是由美国佛罗里达人机认知研究院(Florida Institute for Human & Machine Cognition, IHMC)制造的。
他们设计的初衷就是探寻机械设计如何能够完成机器人复杂的腿部运动。
虽然这款小型机器人看上去行动还有些笨拙,但却是腿足运动机器人领域的一次重要革新。
像文章开头说的那样,“机械鸵鸟”本身并没有配置大量传感器,也没有让人头疼的平衡算法。
它能维持自身的动态平衡,完全源自它独特的机械设计。
该团队的研究者Jerry Pratt表示:“所有的智慧都在于这个机器人的物理结构设计中。”
“机械鸵鸟”使用一个单独的马达驱动机器人的两条腿,腿部的椭圆形运动轨迹和机器人主体的形状一起保持了机器人的内在平衡。
研究人员表示,这个机器人目前能够以每小时16公里的速度跑动。不过如果它按比例放大到人类大小,它就能提速至每小时32-48 公里。
关于“Planar Elliptical Runner”如何保持平衡,我们并没有太多的资料查询,
但是研究人员也给出了“机械鸵鸟”能够维持平衡的关键词,那就是它本名当中的两个字:“椭圆”。
不过,关于椭圆与运动平衡性的问题,我并没有找到明确的答案。

▲目前“机械鸵鸟”正作为一项技术进行研发及测试
未来可能将此技术应用到各具体领域,例如太过危险、或者成本太高、距离太远的场景都可能用到,比如森林火灾、爆炸、核电站事故的现场处理等。
在这些场合,有足机器人具有很高的使用价值。
不过我们必须认识到,这种情况并不普遍,双足机器人面对的是一个小而专的细分市场。
当然,如果你把它改造成摩托车的模样,说不定也有市场!
作者:车少
编辑:顾军
责任编辑:樊丽萍
来源:极客基地、硅谷汽车
违法与不良信息举报电话:021-22898778
本网站文字、图片和视频作品,除特别说明外均为独家授权发布,转载请注明出处和原文链接。