



▲人造感觉神经系统
一直以来,人类都在努力将自身具备的全部感官“复制”到机器人身上,但是,对于机器而言,能实现一项感官就已经很不容易了。因此,迄今为止,机器仍然缺乏一些极其关键的能力,其中就包括人类精密而完善的触觉。
相对于听觉、视觉而言,人类天生的触觉更加复杂,触觉感官的模拟十分困难,这种感官“集成”了上千种感受器来追踪不同类型的压力(比如柔软而有力的触摸),以及感受温度和位置变化的能力。这些庞大的信息需要通过神经网络传送:神经信号通过局部神经簇传到脊髓并最终传到大脑。只有当信号足够强时,信息才能在传输过程中成功连接起来。

▲斯坦福大学鲍哲南教授
最近,斯坦福大学鲍哲南教授、首尔大学 Tae-Woo Lee 教授、南开大学徐文涛教授团队宣布联合研发出一种人造感觉神经(也可称为人造传入神经),能够以类似于生物神经的方式发挥作用,感知触摸过程并与其他神经沟通。论文发表在近日的《Science》上。

根据论文,这种人造感觉神经具有良好的生物兼容性、柔性和高灵敏度,可以探测不同方向的运动,甚至能识别盲文。
此外,团队设法将人造神经与生物体连接起来:把人造神经元的一个电极插入蟑螂腿的神经元后,来自人造神经元的信号能引起蟑螂腿部肌肉的收缩。
可以预想,这种人造触觉神经在机器人手术、义肢感触等领域都将有很好的应用前景,这对“机器触觉”的实现也算是一项重大进展。
三大核心组件
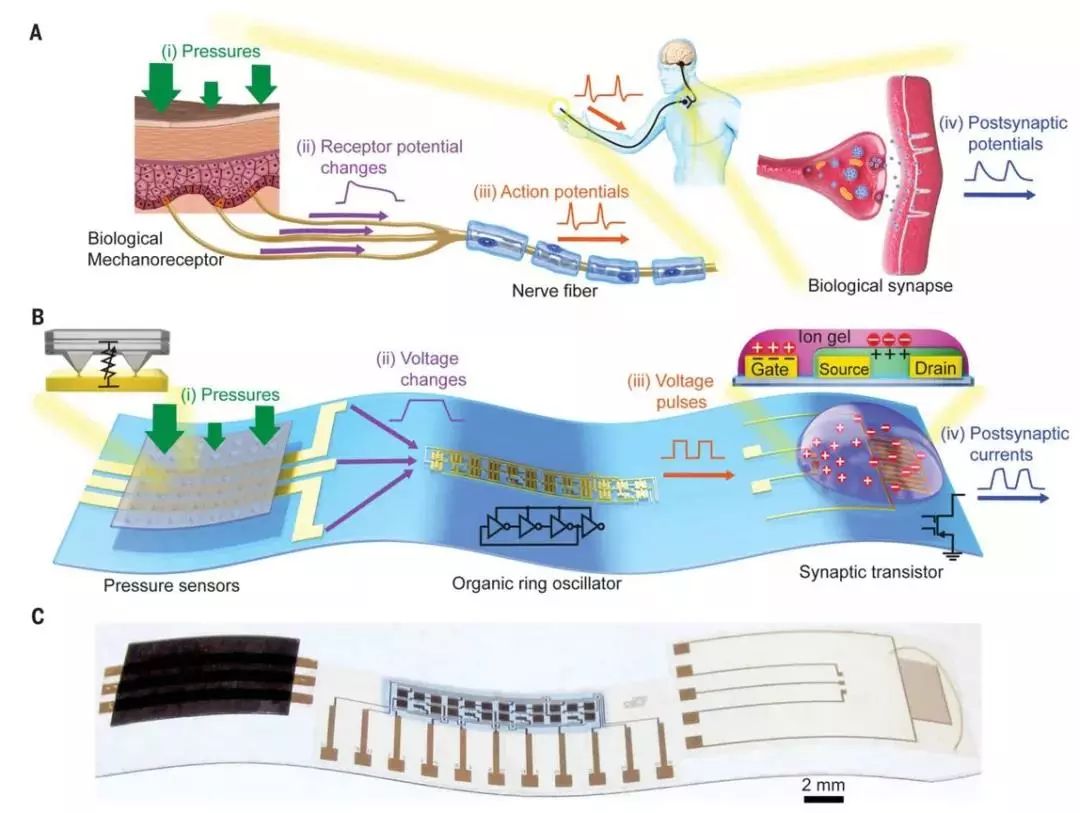
生物传入神经系统的触觉产生机制是:压力作用于生物体的机械型刺激感受器,引起其感受电位的改变,而这种改变会触发神经元动作电位的产生。多个神经元动作电位通过神经元之间形成的突触汇合,最终实现信息处理。
而此次的人造传入神经系统则参考了生物的传入神经系统,由三大核心组件构成:触觉感受器、人造神经元和突触晶体管。
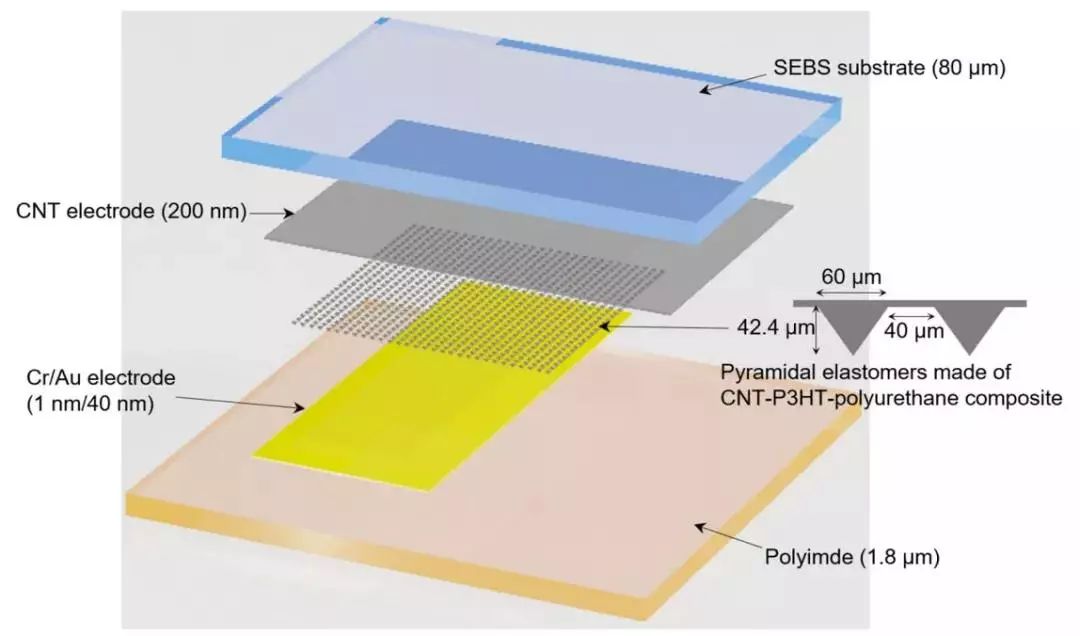
▲“金字塔结构”电阻式压力传感器,“金字塔结构”电阻式压力传感器的灵敏度和工作范围与生物皮肤机械感受器的灵敏度和工作范围相当
其中,触觉感受器由一组压力传感器组成,连接到一个作为人造神经元的环形振荡器上;一系列传感器负责感知压力信号,并由此产生相应的电压变化;之后,环形振荡器会将电压变化转变成电脉冲;最后,突触晶体管将电脉冲输出,从而形成完整的反射弧。
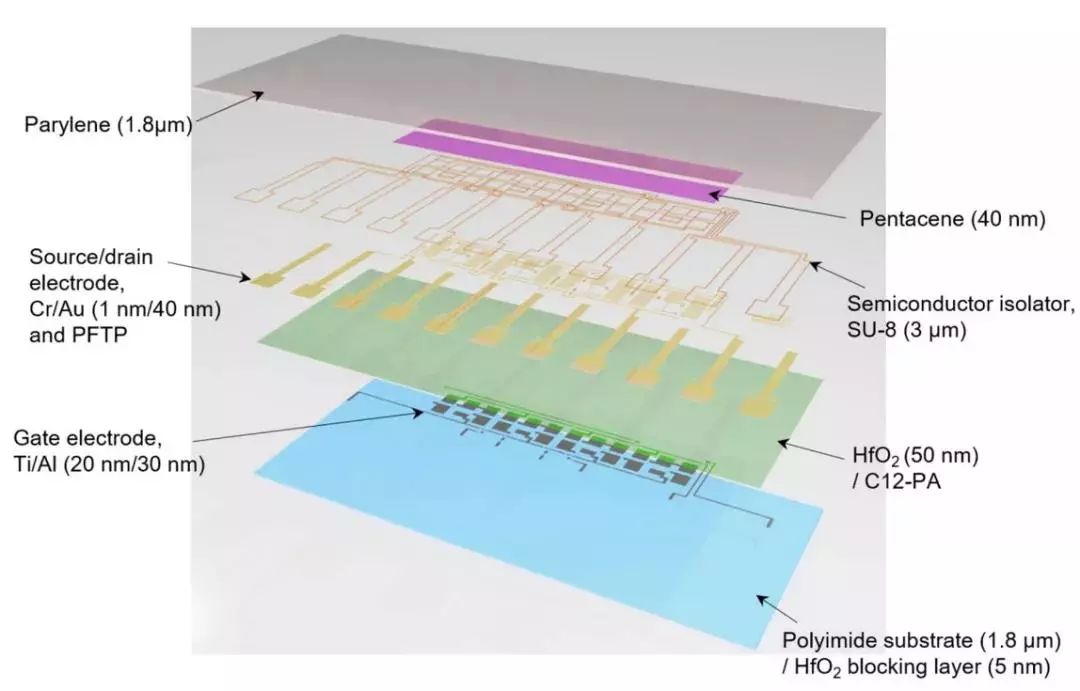
▲柔性材料环形振荡器
针对该人造感觉神经,文章的通讯作者之一、南开大学光电子薄膜器件与技术研究所教授徐文涛介绍道,这个系统还处于初步阶段,从实验室到工业化的过程中仍存在很多挑战,在三个组成部分中都会有所涉及。
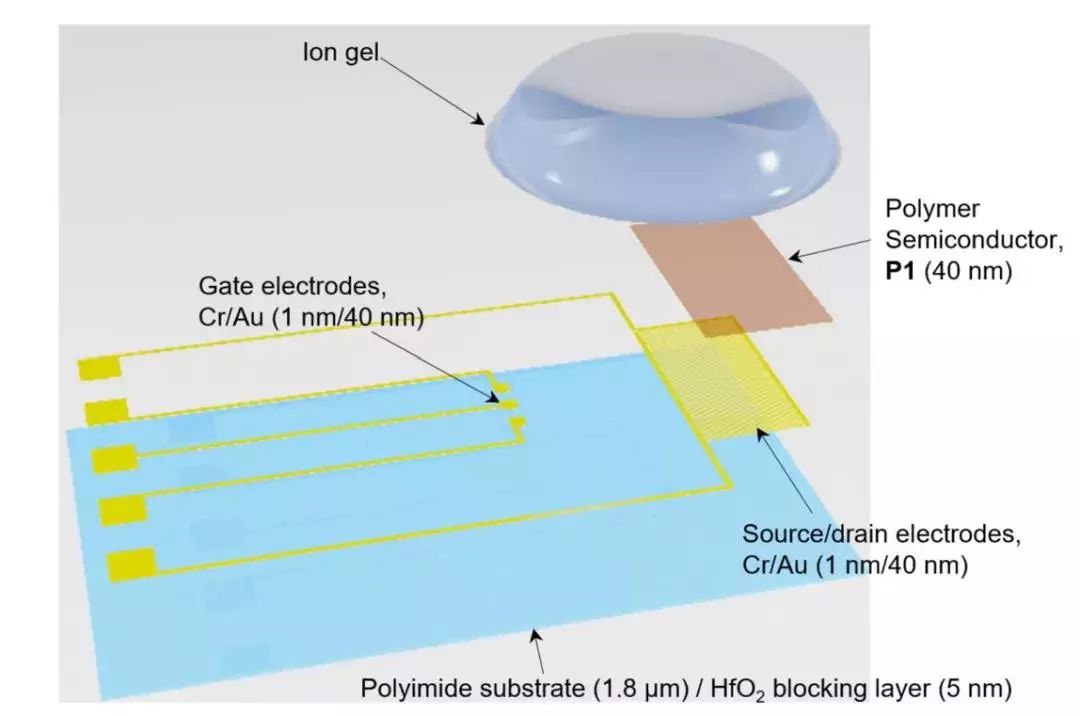
▲人造突触晶体管
“对于传感器来讲,在这项工作中我们尝试了模拟 SA-I 触觉神经(一种边缘、质地相关触觉感知的重要传入神经)。人体皮肤通过多种传感器的集成来感受不同程度的外界刺激,因此在工业化的过程中,需要更加复杂的压力传感集成。柔性电路部分相对复杂,需要较好的工艺过程控制,”他说,“突触器件则具有很大的挑战。其性能调控要求对材料的选择和器件的结构等方面都有较多经验、需要很多的尝试,其大规模集成等也是非常具有挑战性的课题。”
三管齐下:感受方向、传递信息、识别盲文
2015 年,《Science》曾经刊出过鲍哲南团队的一项人造皮肤成果。当时,团队制造的人造皮肤已经可以响应压力变化,并向神经细胞发送信号,因此更接近人皮肤触觉的真实机制。
而这一次的人造感觉系统能够帮助人造皮肤实现更接近生物体的触觉,正如上文所提,该感觉系统已经能够感受方向、传递信息和识别盲文。

▲人造传入神经系统识别物体运动方向,一个杆状物体以不同的移动方向(红色和蓝色箭头)通过两个压力传感器分支,突触晶体管的突触后电流会输出对应于移动方向的不同波形,从而识别出物体的运动方向
在识别盲文的试验中,研究人员以 3X2 像素的盲文字符作用于对应的 6 个压力传感器,并利用 6 个对应的环形振荡器实现信号的转换,最后通过多个突触晶体管获得突触后电流的波形以实现对盲文字符的识别。
根据突触后电流的峰值频率的特征,就能对应于盲文字符的每个像素(如图 B)。例如(如图 C),盲文字符的每个像素所产生的接触压力不同,其对应的突触后电流的峰值频率也会产生对应的差异,从而实现盲文字符的“阅读”。
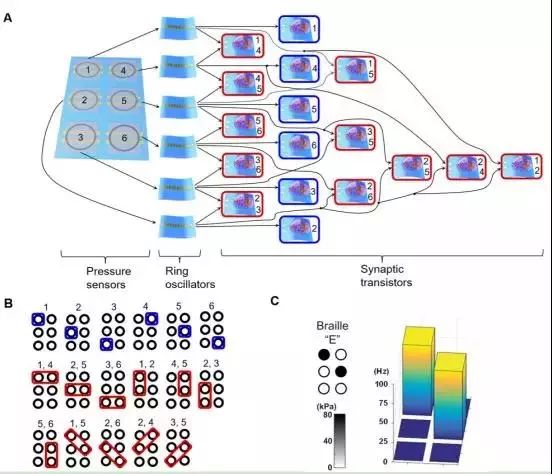
▲人造传入神经系统用于盲文阅读
但是,光有灵敏的压力感觉还不能打造出我们真正需要的人造感觉神经,它还必须能够实现生物体神经信号的兼容。因此,研究人员将这种神经连接到蟑螂腿上实现运动的控制,则初步证实了这种兼容性。
研究者将制作的人造感觉神经与蟑螂腿的生物运动神经连接,组合成生物-电子混合反射弧,实现了蟑螂腿的弹跳反射运动。团队把人造神经元的一个电极插入蟑螂腿的神经元,来自人造感觉神经的突触后电流经过特定放大器后连接至一条蟑螂腿,当人造感觉神经接收到压力的输入时,产生的放大信号会引起腿部胫骨伸肌的兴奋,蟑螂腿的弹跳反射就被激活了。
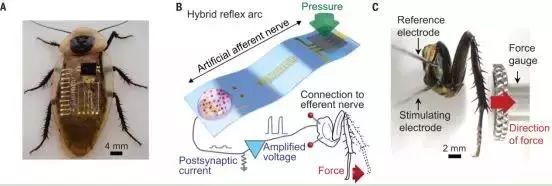
▲人造传入神经与生物传出神经接口形成的生物-电子混合反射弧
“对于 SA-I 类触觉神经的模拟,我们已经将其响应速度控制在与生物体系非常接近的范围。而对于我们的系统来说,可以实现更大的灵活性,其响应速度是完全可以超越生物体系的。”徐文涛教授介绍说。
他也提到,从功耗的角度上来说,这种人造感觉神经仍然有非常大的提升空间。比如,其中人造突触晶体管的部分,团队一直在致力于将其能耗进一步降低。目前,纳米线结构的人造突触晶体管能耗已经被降至与生物突触类似的程度。
徐文涛及其团队表示,目前这款人造感觉神经还处在初步阶段,尚不能像皮肤那样感知更加复杂的机械信息以及温度等,这些将是他们未来的工作方向。这款发明让他们有望开发出更智能的人造皮肤,希望通过进一步强化和功能拓展,尽早将其投入应用,造福人类。
编辑:李晨琰
责任编辑:许琦敏
来源:综合自微信公众号“DeepTech深科技”“科学大院”。
违法与不良信息举报电话:021-22898778
本网站文字、图片和视频作品,除特别说明外均为独家授权发布,转载请注明出处和原文链接。