>>>从大狗到 Handle,波士顿动力都做过哪些令人惊叹的机器人
创始人对机器人技术极致的追求,也敦促着波士顿动力机器人不停地更新迭代。从最早爆红的军用机器人「大狗」开始,波士顿动力每出一款机器人都及其引人注目,甚至会掀起一阵阵机器人要逆天的伦理性大讨论。
1.Petman

Petman 是一款用于测试化学防护服装的仿人机器人,自然又敏捷的运动对 Petman 来说是至关重要的,因为它需要模拟士兵在现实条件下对防护服的反应。
不同于以往运动受限且过度依赖机械支持的测试机器人,Petman 能够自主平衡,运动也更加自由;在接触化学战争物质的情况下穿着防护服完成行走,弯腰以及各种动作。
Petman 能调控自身的体温、湿度和排汗量来模拟人类在防护服下的反应,从而达到最佳的测试效果。
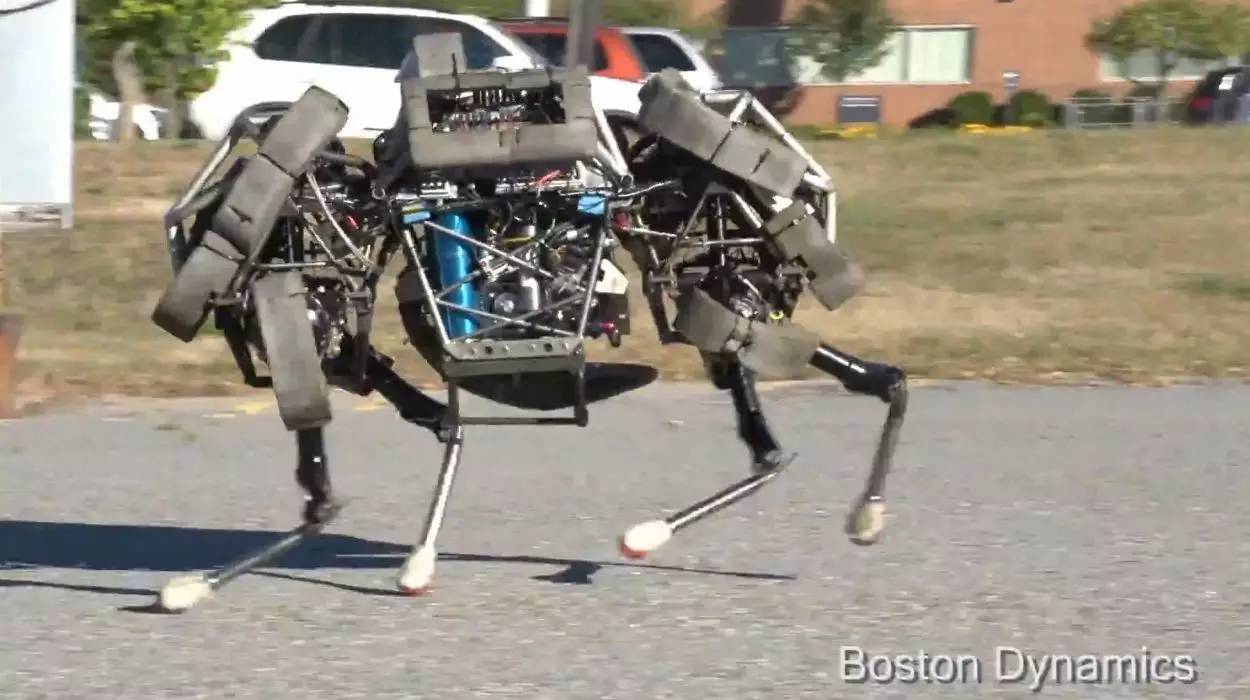
2.Big Dog(大狗)
这是让波士顿动力声名远播之作,Big Dog 是一款能够适应复杂地形条件的机器人,能行走、奔跑、攀爬以及负载重物,由液压系统驱动引擎。Big Dog 的四条腿和动物一样拥有关节,可吸收冲击,每迈出一步就回收部分能量,以此带动下一步。
Big Dog 的体格与一只大狗或小骡子相当。大约 3 英尺(约合 0.9 米)长, 2.5 英尺(约合 0.76 米)高,体重 240 磅(约合 109 千克)。奔跑速度为 4 英里/时(约合 6.4 公里/时),最大爬坡度数为 35 度,可在废墟、泥地、雪地、水中行走,可负重 340 磅(约 154 千克)。
Big Dog 的机载计算机能够控制躯体移动和过程传感器,还能处理通讯。其控制系统保持躯体平衡,在不同的地形选择不同的运动和导航方式。 Big Dog 的运动感测器包括:联合位置、联结力、接地触点、接地负载、一个雷射陀螺仪、一个激光雷达和立体视觉系统。它的其他传感器则专注监测内部各项指标状态,如液压、油温、引擎功能、电池充电情况等。该研究项目由 DARPA 提供资金支持。
3.Little Dog(小狗)
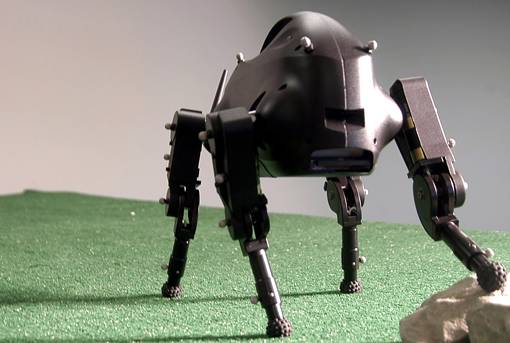
Little Dog 是一款用来研究移动的四足机器人样机,研究人员用它来探测运动学、动态控制、环境感知与复杂地形移动之间的基本关系。目前 Little Dog 在麻省理工学院、斯坦福、卡内基梅隆大学、南加州大学、宾夕法尼亚大学等高校均有所应用,同时也是 DARPA 投资的先进机器人项目。
Little Dog 有四条腿,每条腿都分别有三个电机驱动,可移动范围非常大。这个小小的机器人能够爬坡、也能实现动力学运动步态,其机载 PC 电脑随身携带的 PC 级别的电脑用控制致动器、处理传感器信号和外界交流。
Little Dog 的传感器主要负责测量关节角度、电机电流、体平衡和接地触点的状况,机载锂电池能保证 30 分钟的连续运行。并可通过无线通信和数据采集系统,可以进行远程遥控和数据分析。该项目由 DARPA 信息处理技术办公室提供资金支持。
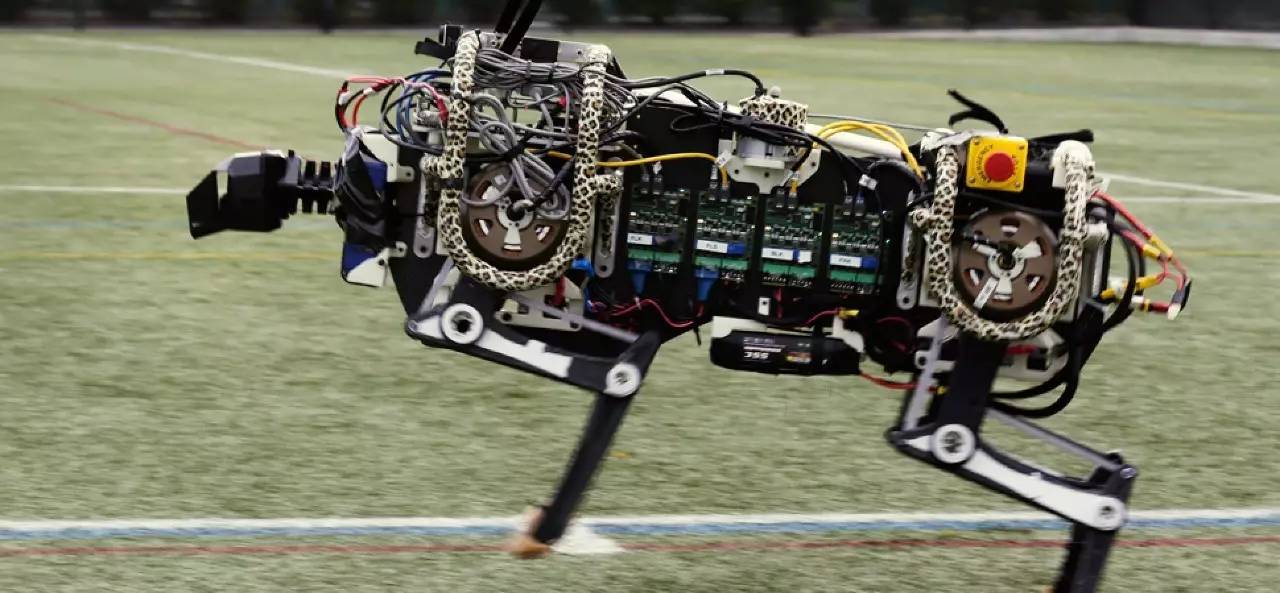
4.Cheetah(猎豹)

Cheetah 是目前世界上速度最快的腿式机器人,奔跑速度超过 29 英里/时(约合 47 公里/时)。其背部结构是关节型的,能够随着每一个动作灵活地来回移动,提高了步幅和奔跑速度,这与动物的运动原理相差无几。它的驱动力来自外部的液压泵。DARPA 为该机器人的项目提供资金支持。
5.Wild Cat(野猫)
Wild Cat 实际上是 Cheetah 的自由运转版本,虽然它的速度尚未达到 Cheetah 的水平,但这种四腿机器人无论遇到哪种地形,也能以 16 英里/时(约合 25 公里/时)的速度奔跑。此外,它还可以快速跳跃和转身。

 文汇报官方微信
文汇报官方微信
 汇拍微信
汇拍微信
 汇玩微信
汇玩微信
 汇吃微信
汇吃微信
 汇演微信
汇演微信
 文汇讲堂
文汇讲堂
 上海跑步者
上海跑步者


