




▲团队大学生演示“助力柑子采摘器”采摘柑子。
通过可锁止高度调节机构,实现不同高度的果实采摘;折叠机构实现助力部分的折叠——采用可穿戴、可折叠式设计的“助力柑子采摘器”,用灵活机械代替手工劳动,解决了柑子采摘费力、收集费时、采摘劳动强度大的问题……
近日,西安交大举行科技创新成果发布会,发布了由该校大学生研发的“助力柑子采摘器”“菠萝钢铁侠”“扭转抓取式苹果辅助采摘器”“跨越下行复合交换式立体停车装置”等成果。

▲设计团队大学生周意葱介绍“助力柑子采摘器”设计背景及设计原理。
在今年7月下旬于浙江工业大学举行的第八届全国大学生机械创新设计大赛决赛中,西安交大有14项作品入围决赛,夺得一等奖12项、二等奖2项,其中5项推选进入“中国好设计”大赛,总获奖数、一等奖数量、入选“中国好设计”大赛数量均居全国第一,再创历史最好成绩。作为陕西赛区组委会主任单位,西安交大还获得优秀组织奖。
在西安交大机械基础实验教学中心(国家级实验教学示范中心),记者目击了几个项目的操作演示。
可穿戴、可折叠的“助力柑子采摘器”,可实现单次多个、多次多个收集柑子
由周意葱、云京新、肖佳诚、张磊、侯相国5位同学研发的柑子采摘器,功能上分为采摘、收集和助力3大部分——采摘部分采用对称十杆机构带动刀片运动切割果柄;收集部分既可收集不同高度的柑子,也可实现单次多个、多次多个收集;助力部分,采用可穿戴、可折叠式设计,既提高操作者的舒适性,又携带方便。


▲现场演示采摘器采摘柑子。
运用这种采摘器,使得柑子采摘快捷高效,简洁安全。按动手柄,联动式对称十杆机构带动刀片运动切割果柄,实现精准采摘,柑子顺势落入收集器。这种采摘器在结构上创新性地采用对称十杆机构,操作者仅需较小力量即可达到较好的采摘效果,且采用机械驱动,运行安全可靠。采用可穿戴、可折叠式设计,将采摘杆的重量分散到肩部和腿部,使得操作更加舒适。作业完成后,可进行折叠,直接装进双肩包。
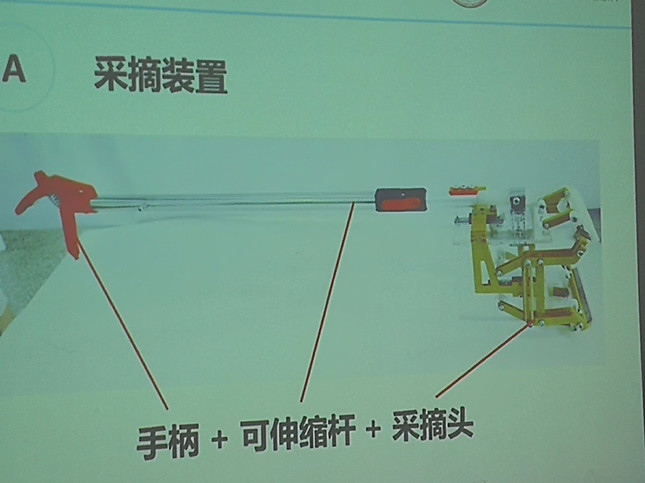
▲“助力柑子采摘器”的采摘装置组成图。

▲可调节的采摘头。
穿戴在手臂上的“菠萝钢铁侠”,可实现菠萝的低损伤采摘
菠萝田植株密集,地势崎岖,不适合机器作业。菠萝幼苗需要保证完整,进行下一季的培植。菠萝果实沉重、扎手,果实高度在大腿处,采摘需要重复弯腰。这是人工菠萝采摘面临的主要问题。
由周峥、郝頔生、许起超、张迪4位同学研发的单人操作的穿戴式采摘装置——“菠萝钢铁侠”,可以实现菠萝的低损伤采摘(不伤害幼苗),防止扎手,避免重复弯腰。
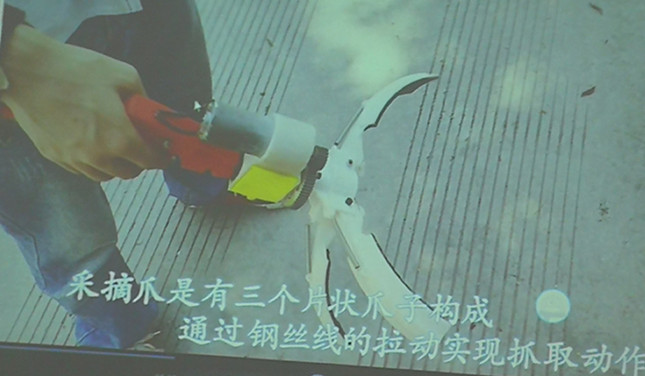
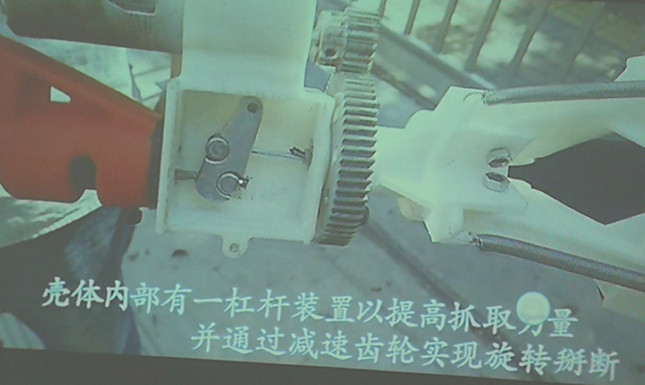
该装置主要由采摘模块、外骨骼模块和控制模块3部分组成,穿戴在手臂上。采摘模块主要由3组周向不均布的夹持爪、减速电机、齿轮套和省力杠杆组成,工作时首先通过驱动模块驱动夹持爪夹紧菠萝,随后,减速电机带动齿轮套转动将波萝掰断。为了减小手掌握力,还设计了一个省力杠杆以减轻劳动强度。此外,针对采摘模块带来的力臂加长、手臂负载较大的问题,作品利用外骨骼结构将手臂承受的力传递到肩部和背部,并通过电机做功来分担一部分的菠萝重量,从而减轻手臂负担。
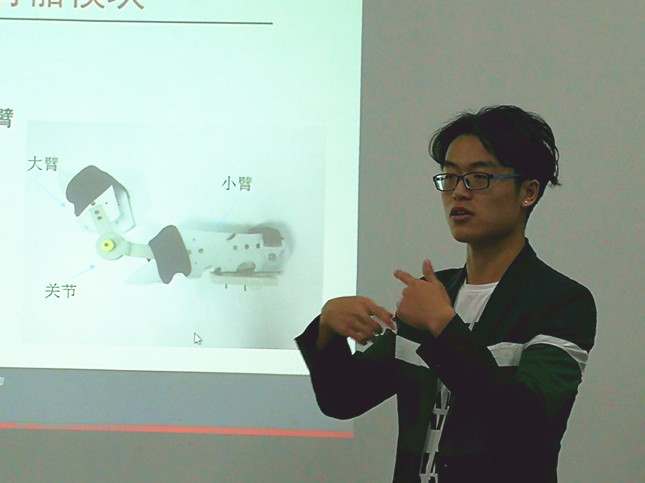
▲设计团队大学生郝頔生介绍“菠萝钢铁侠”的设计背景及设计原理。

▲ 可穿戴在手臂上的“菠萝钢铁侠”。
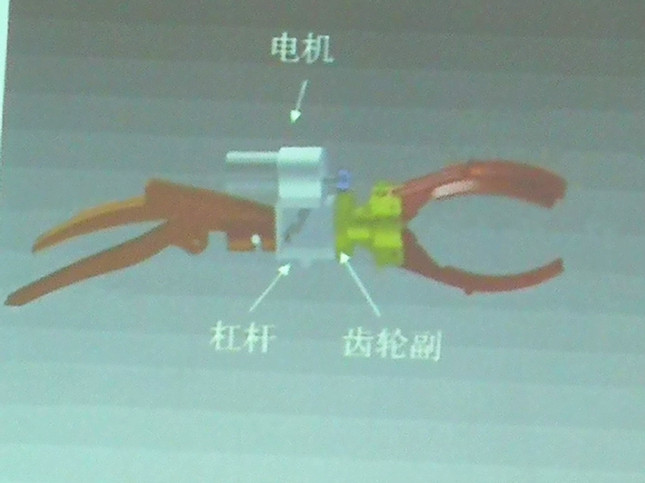
▲采摘模块结构图。
据设计者介绍,该装置的创新点在于,采用不对称的三爪模仿人手,有效夹紧菠萝;将外骨骼应用到菠萝采摘中,将人手臂承担的重量分配到肩膀,有效降低了劳动强度;将机器人中的柔性变刚度关节引入外骨骼中。
▲ “菠萝钢铁侠”设计原理示意图。
“扭转抓取式苹果辅助采摘器”实现了苹果的采摘、收集和计数功能
苹果的采摘和收集主要由人站在高处完成,不仅劳动强度大,安全性也得不到保障。苹果采摘的难点在于如何安全准确地采摘中、高处的苹果,并且保证采摘时苹果不受损坏。基于此,李熹伟、孙亚超、张多鹏、贠菁、李铮儒5位同学研发了扭转抓取式苹果辅助采摘器。


▲大学生现场演示“扭转抓取式苹果辅助采摘器”作业。
这种采摘器主要由机械手、助力杆和分类收集小车3部分组成。通过触发开关,机械手精准抓取并扭转苹果柄,之后,被摘下的苹果顺着收集通道,缓缓滚入称重摆盘上,苹果最后根据重量被精确地分类装入大、小不同的容器中。该采摘器实现了苹果的采摘、收集和计数功能,大大减轻了果农工作的强度,人站在地面可实现高处采摘,提高了该领域的工作效率。此外,还加入了不少科技元素,太阳能电池板提供设备能源,称量装置同步称量苹果分类收集,信息手机模块还可同步上传苹果数据,建立苹果采摘数据库,为果园管理提供数据支撑。
文:文汇报驻陕记者韩 宏
图:韩 宏
编辑制作:韩 宏
责任编辑:叶志明
*文汇独家稿件,转载请注明出处。
违法与不良信息举报电话:021-22898778
本网站文字、图片和视频作品,除特别说明外均为独家授权发布,转载请注明出处和原文链接。