



模块式主动自组装太空望远镜群图解
在研制新一代太空望远镜方面,美国宇航局(NASA)提出了一些非常先进的概念,包括凌日系外行星勘测卫星(TESS)、詹姆斯·韦伯太空望远镜(JWST)和宽视场红外巡天望远镜(WFIRST)。TESS卫星于最近发射升空,韦伯望远镜预计于2020年发射,WFIRST望远镜仍在研制之中。
除了这些观测设备,宇航局还锁定了一系列有发展前景的提议,将其作为2020年天体物理学十年调研的一部分,其中最雄心勃勃的提议当属采用模块式设计的自组装太空望远镜。最近,这一提议跻身2018年宇航局创新先进概念(NIAC)计划第一阶段获奖项目名单。
自组装太空望远镜项目由康奈尔大学机械与航空航天工程学助理教授德米特里·萨拉斯基带队,另有15名美国研究员参与了这一项目。他们构想了一架口径30米,采用模块式设计和自适应光学仪器的太空望远镜。更令人感到吃惊的是,模块群可以自行组装。

16个先进概念获得美国宇航局NIAC计划第一阶段的奖金
萨拉斯基教授深谙太空望远镜和系外行星搜寻,曾帮助组装和测试双子座行星成像仪——座落于智利的双子座南站望远镜上的装置。此外,他还参与了双子座行星成像仪系外行星观测任务的规划。2015年,这项观测任务发现了一颗环绕波江座51的类木行星(波江座51b)。
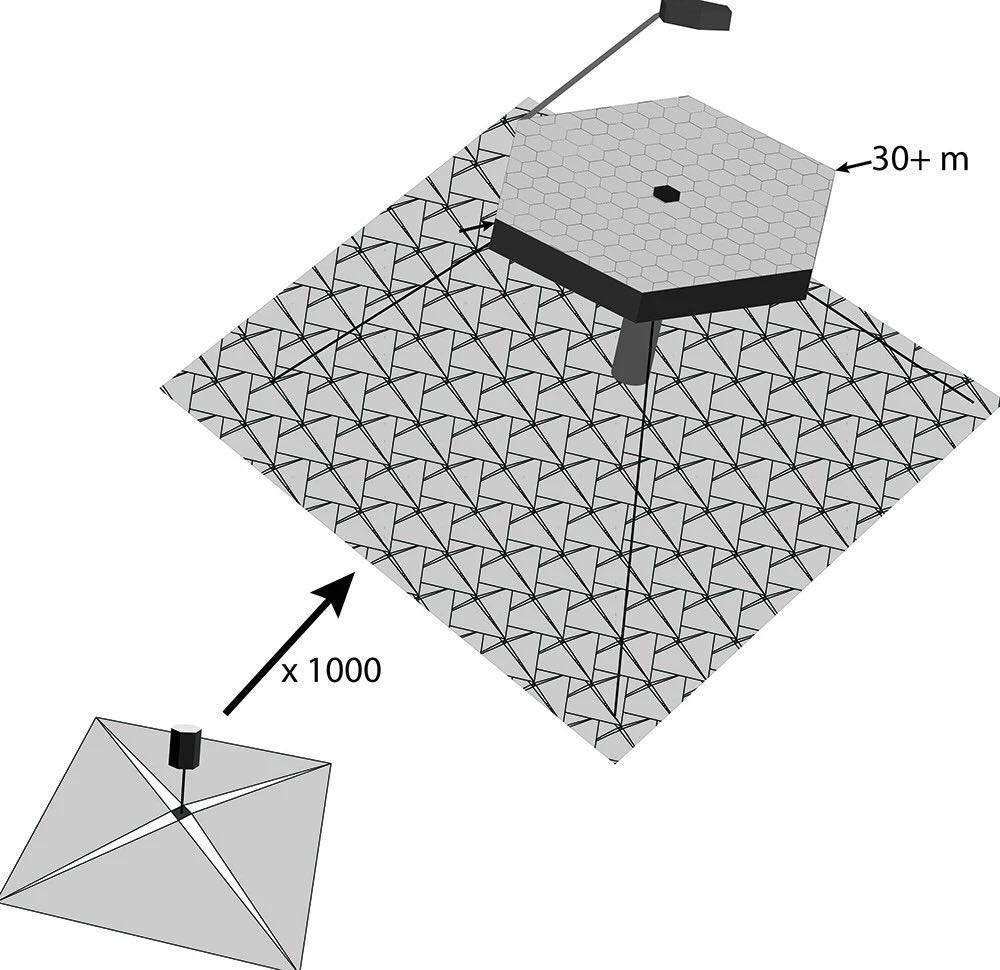
萨拉斯基教授认为自组装是未来研制超级望远镜的理想途径。他的团队在提议中这样阐述自组装望远镜:“包括主镜和副镜、次级支撑结构和平面遮阳板在内,望远镜的整个结构都将从一个单一的批量生产的飞船模块开始建造。每个模块由一个1米宽的六角形飞船构成,顶部覆盖一个无边框主镜组件。”
这些模块可以独立发射,而后借助展开的太阳帆飞行到日-地L2点。一旦模块自行完成组装,太阳帆将充当望远镜的遮阳板,整个过程无需人类或者机器人协助。毫无疑问,这是一种非常先进的太空望远镜建造方式,也因此引起了NIAC计划的关注。
萨拉斯基在最近接受《康奈尔编年史》采访时表示:“这正是NIAC计划追求的先进概念。首先,你提出一些看似疯狂的想法,而后通过一系列初步计算来支撑你的想法。随后,你要在9个月内回答与可行性有关的问题。”
大型紫外/光学/红外巡天望远镜(LUVOIR)的艺术概念图
3月30日,2018年NAIC计划第一阶段的获奖名单对外公布。获奖团队拿到12.5万美元奖金,在9个月内进行他们的研究。如果取得成功,获奖者可以申请第二阶段的奖金。
康奈尔大学机械与航空航天工程学副教授、前宇航局首席技术官梅森·派克指出,萨拉斯基的自组装太空望远镜设想处在正确轨道。他说:“随着自主飞船越发普遍以及我们不断改进小尺寸飞船的制造技术,这让萨拉斯基提出的问题变得非常有意义——我们能否建造一架看的更远,性能更卓越,只需低廉的小部件便可在轨道中自行组装的太空望远镜?”
自组装设想的目标任务是大型紫外/光学/红外巡天望远镜(LUVOIR)。作为宇航局2020年十年调研的一部分,这架望远镜正在研发之中。根据宇航局戈达德太空飞行中心公布的任务概念,LUVOIR将采用分块式主镜,口径在15米左右。
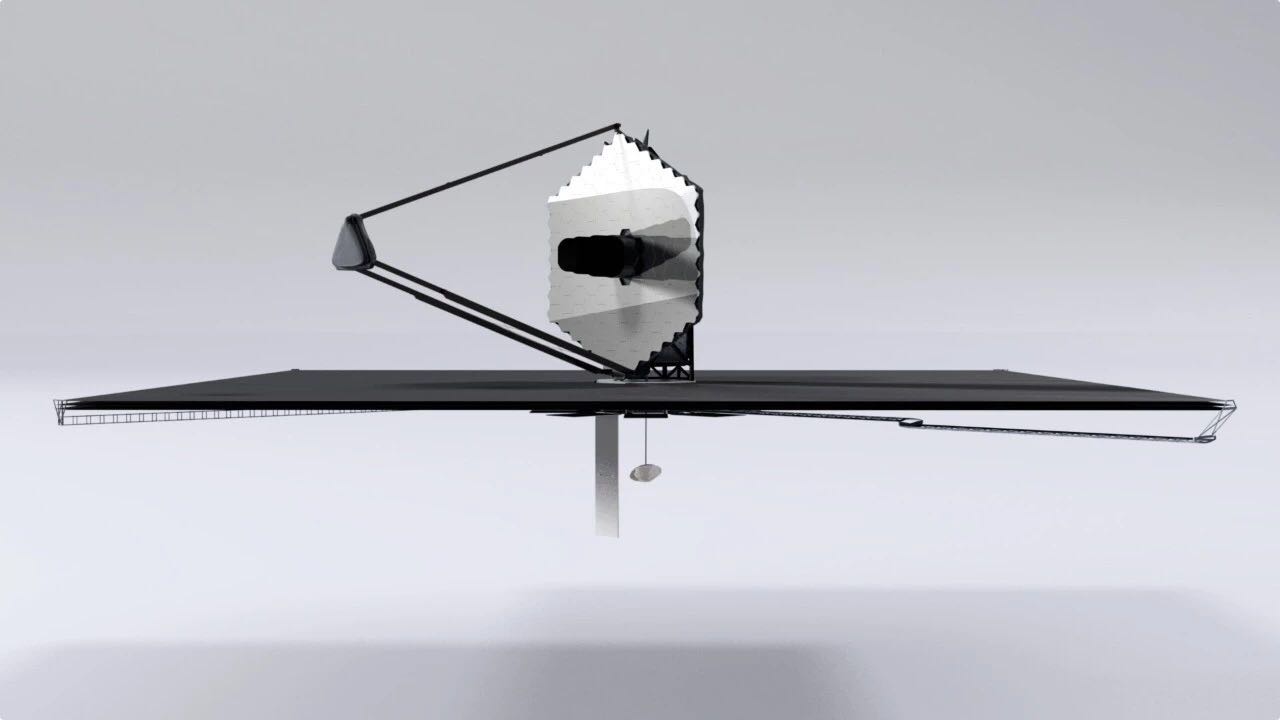
与JWST望远镜一样,LUVOIR的主镜由可调节的子镜构成。一旦望远镜部署到太空,子镜便会展开。促动器和马达主动调节子镜,让它们步调一致,以实现完美聚焦,捕获暗淡和遥远天体的光线。
这项任务的主要目标是发现新的系外行星,以及对已发现的系外行星反射的光线进行分析,评估它们的大气层。
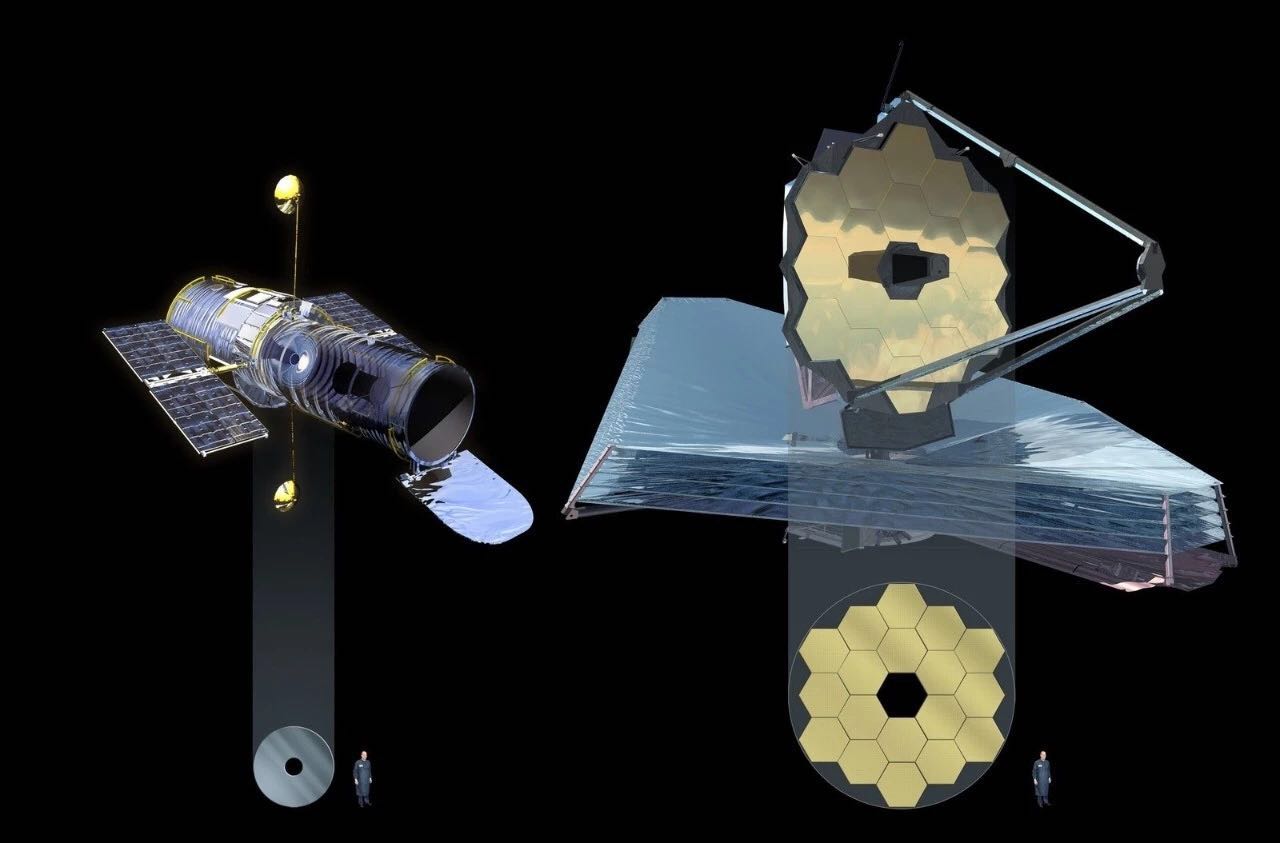
左为哈勃太空望远镜,主镜口径2.4米,右为詹姆斯·韦伯太空望远镜,主镜口径6.5米。LUVOIR的主镜口径达到15米
萨拉斯基团队在他们的建议中指出,他们的设想与宇航局科学仪器、观测台、传感器系统以及机器人技术和自主系统的技术路线图的优先事项是一致的。他们同时指出自组装是建造巨型太空望远镜的可行方式。哈勃和韦伯采用的技术都不可能制造巨型望远镜。
萨拉斯基说:“詹姆斯·韦伯望远镜将成为我们送入太空的体积最大的天体物理学观测台。它的建造难度超乎想象。如果建造体积更大的望远镜,10米或者12米口径,甚至30米口径,我们几乎不可能利用与韦伯等望远镜相同的技术,来完成这项任务。”
利用第一阶段的奖金,萨拉斯基的团队计划进行详细模拟,以揭示模块如何在太空中飞行和会合,同时确定需要制造多大尺寸的太阳帆。此外,他们还计划对主镜组件进行分析,以确定完成组装后模块能否达到所需的面形精度。
派克指出如果自组装的概念取得成功,萨拉斯基的提议将颠覆游戏规则。他说:“如果萨拉斯基教授证明利用小尺寸模块制造大型太空望远镜具有可行性,他将改变我们探索太空的方式。我们能够以可承受的成本建造性能更高的望远镜,让我们看到更远的宇宙区域,甚至有可能看到系外行星的表面。”
6月5日和6日,宇航局将在华盛顿召开NIAC情况说明会。第一阶段的所有获奖者将齐聚一堂,探讨彼此的想法。获得第一阶段奖金的其它提议包括:勘测土卫六“泰坦”的变形机器人“变行者”;探测金星大气层的超轻型高空传感器;探索火星的扑翼机器人群;用于执行星际探索任务(与突破摄星计划类似)的无衍射波束推进器PROCSIMA;用于探索地外海洋世界的蒸汽动力机器人SPARROW以及由真菌打造的自复制栖息地。
来看看都有哪些疯狂想法?
土卫六勘测机器人“变形者”

艺术概念图,“变形者”正在勘测克拉肯海
“变形者”能够应对各种环境,无论是在大气层中飞行,在平滑表面行进,探索地下洞穴还是潜入湖底和勘测海底世界。它是一款两栖飞行机器人,由体积较小的协作式机器人构成。这些小机器人可以让“变形者”变换成各种形态,以应对不同环境。
金星高空环境和大气传感器(LEAVES)
LEAVES艺术概念图
LEAVES是一款超轻量型被动升空并且成本低廉的大气传感器,在设计上能够经受住严酷的金星大气环境考验。此外,它还能提供一个平台,用于原地收集任何行星的大气样本。根据任务设想,宇航局可以部署多个一模一样的LEAVES,以覆盖广阔区域。
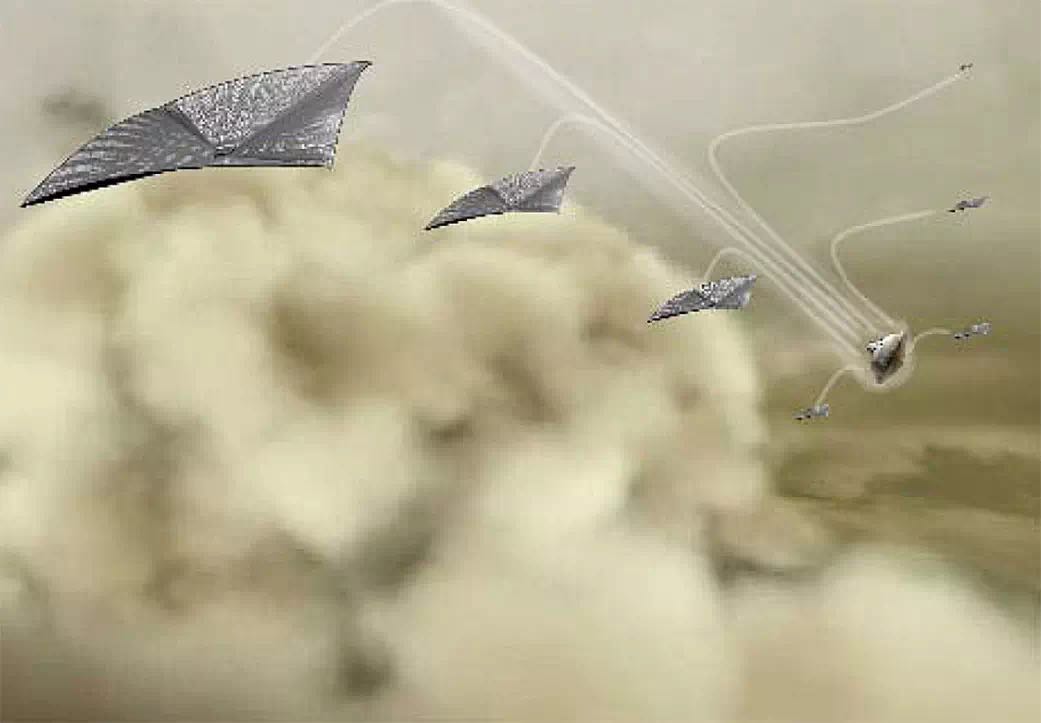
探索火星的扑翼机器人群
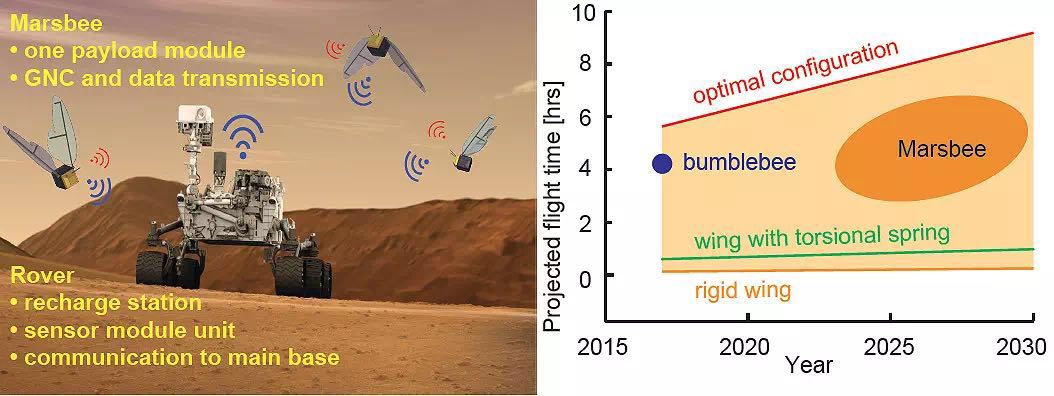
“火星蜜蜂”图解
根据任务设想,火星车将充当一个移动基地,与扑翼机器人群相互配合,完成火星探索任务。这种扑翼机器人被形象地称之为“火星蜜蜂”。它们的体型与蜜蜂相当,翅膀尺寸与蝉翼差不多,同时集成传感器和无线通讯装置。
用于突破星际任务的无衍射波束推进器(PROCSIMA)
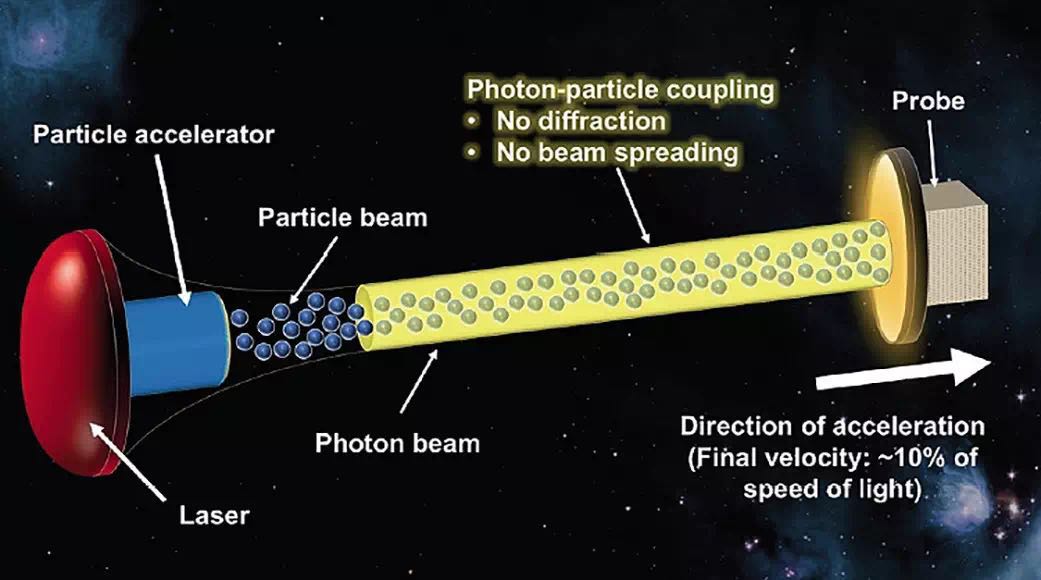
PROCSIMA图解
PROCSIMA是一种革新性的波束推进系统,能够让比邻星探索任务成为可能。与激光推进相比,PROCSIMA能够大幅提高飞船的加速距离,同时能够将发射器和探测器的波束尺寸从10公里降至不到10米。这些优势意味着更大的速度变化和有效载荷。
用于探索地外海洋世界的蒸汽推进自主检索机器人(SPARROW)
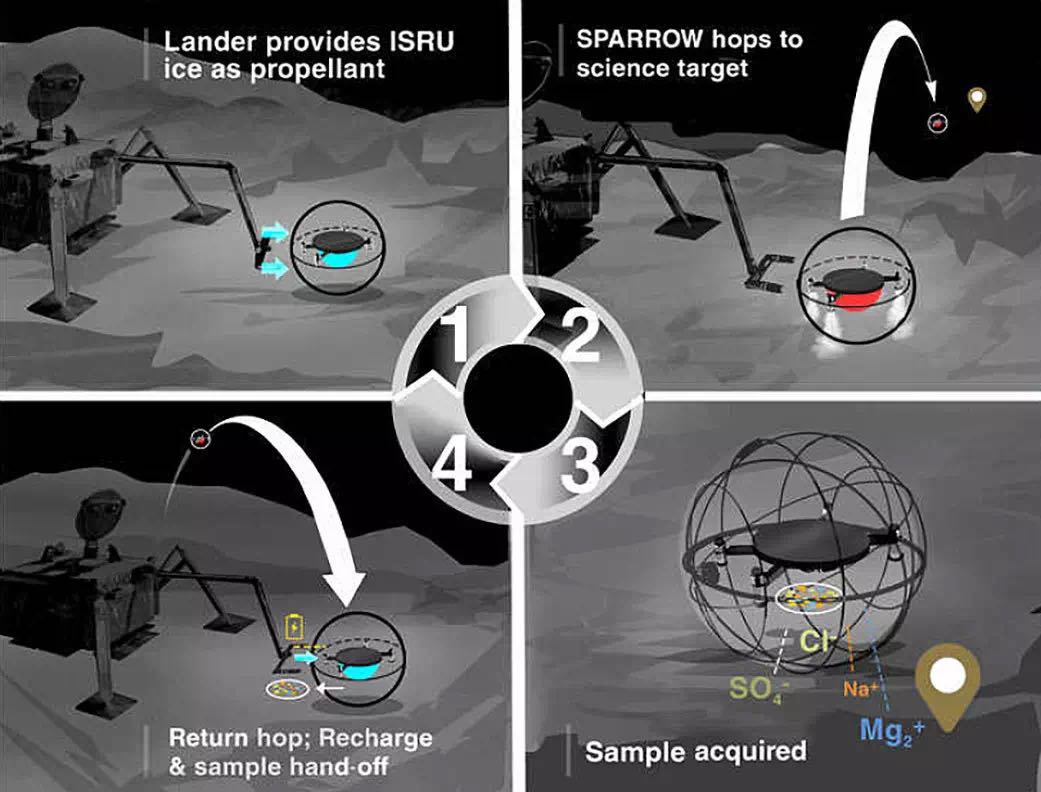
SPARROW图解
SPARROW是一款以弹跳方式向前推进的机器人,可用于探索地外海洋世界。在设计上,它们能够经受住严酷的辐射环境考验和战胜复杂地形。
能够生长的外星表面结构
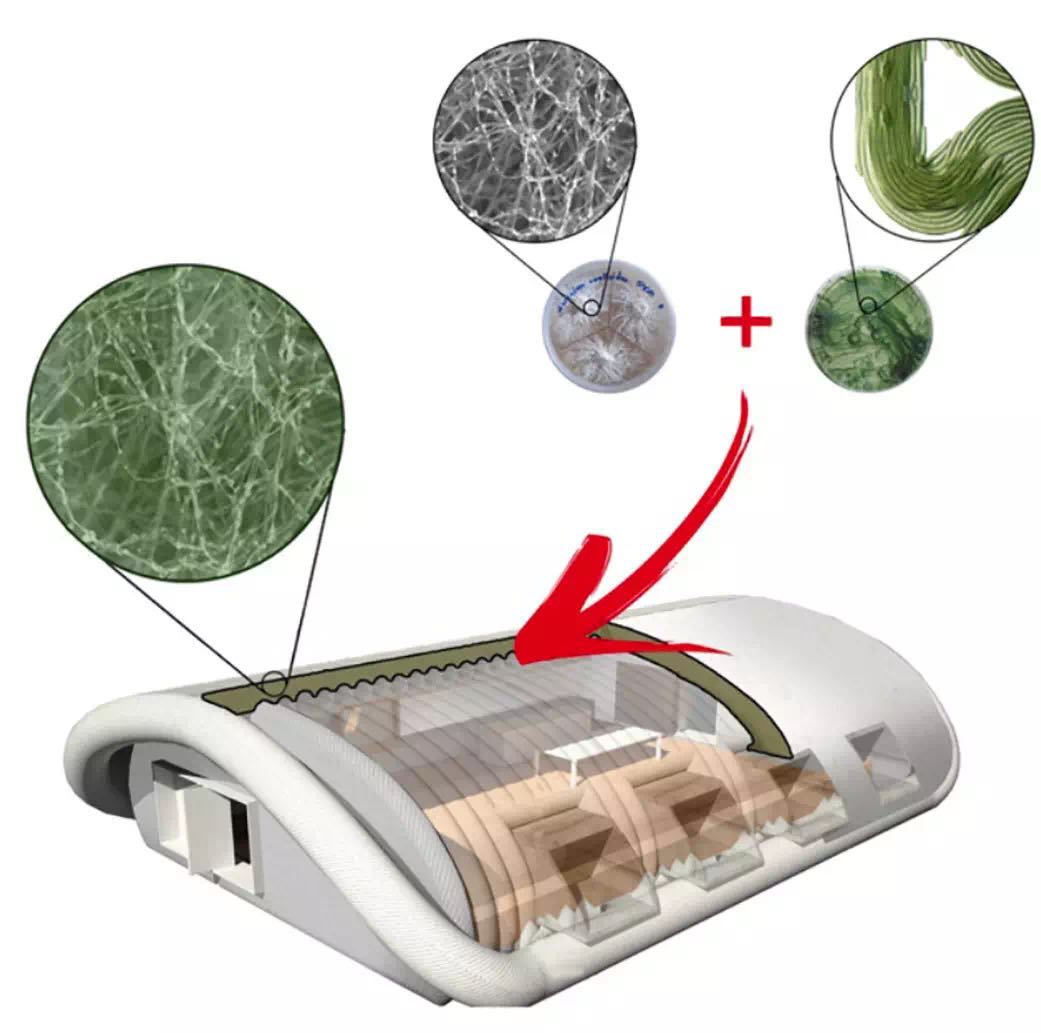
真菌打造的自复制外星栖息地
想象一下,一个由轻型纤维材料(真菌菌丝)打造的,具有优良机械性能的栖息地。这种材料可在干燥、潮湿、寒冷的环境使用。它们可以自我复制,让栖息地不断扩张并自我修复。这种材料的某些形态可用于在外星建造栖息地、建筑物、探测器外壳和家具。
编辑:郝梦夷
责任编辑:张鹏
来源:转载自公众号“漫步宇宙”
违法与不良信息举报电话:021-22898778
本网站文字、图片和视频作品,除特别说明外均为独家授权发布,转载请注明出处和原文链接。