



第九届中国(上海)国际技术进出口交易会6月15日在上海世博展览馆拉开帷幕,来自全国各省区市的高新技术企业、专精特新企业、独角兽企业带来众多自主研发的创新成果,一批亮点项目展现在观众眼前。

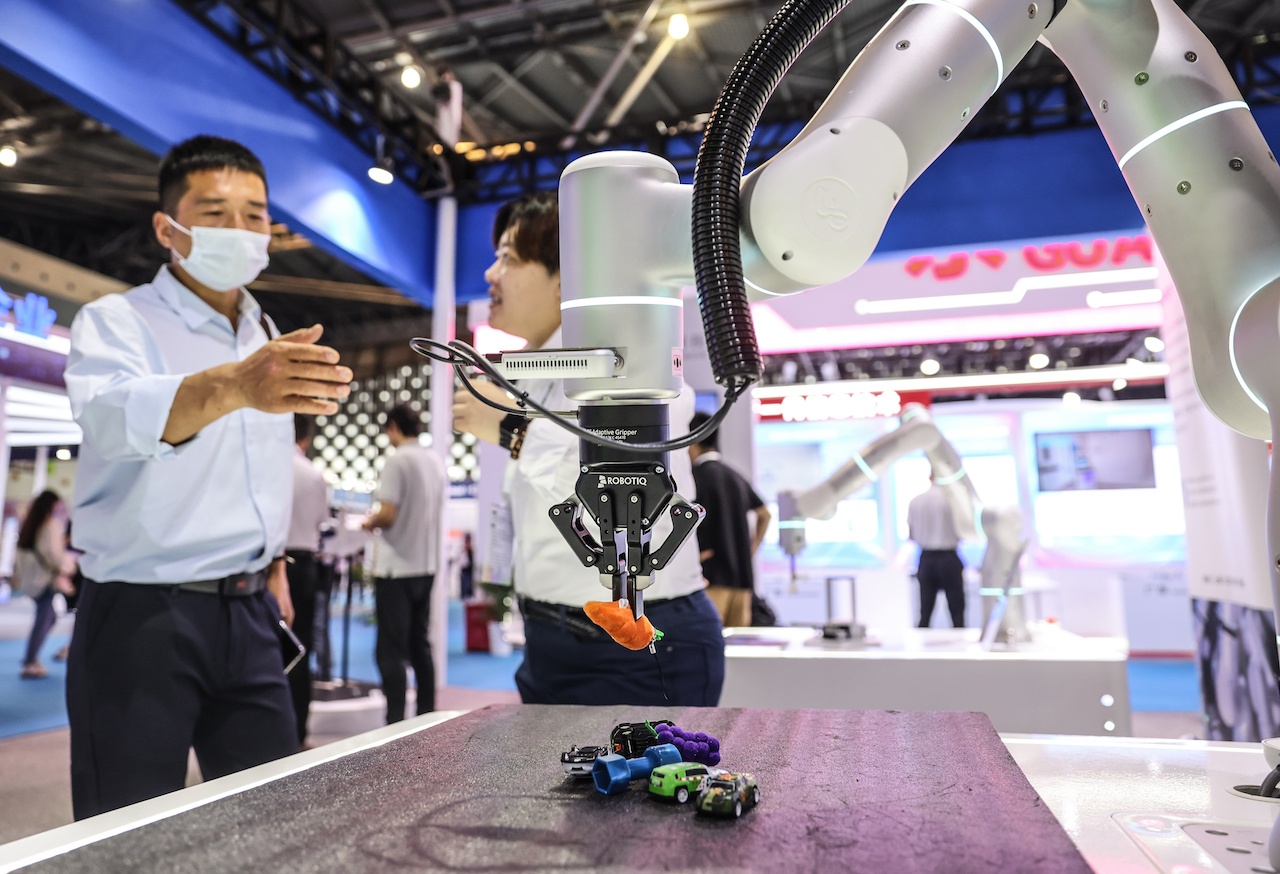
在侨商主题展区里,一款结合人工智能算法和工业机器人的有趣应用吸引了不少参观者。这是来自上海非夕科技智能机器人联合实验室共同开发的一款基于视觉的机器人通用抓取算法,名为“AnyGrasp”。


现场所展示的这款工业机器人搭载AnyGrasp算法的非夕自适应机器人Rizon可以对未知物体直接进行高速抓取,不受物体种类、是否可变形限制,无需提前的物体建模,对光照、物体纹理皆不敏感。AnyGrasp还具有极快的检测速度,只需数十毫秒即可生成上千个抓取点,同时单次抓取决策时间极短,因此单位小时内成功抓取效率极高,能像人一样快速地将各类摆放不整齐、杂乱的物品,例如碎瓷器、玛瑙石、柔性袋装零食或布娃娃等,准确且稳定进行抓取。从效果看,这款机器人在复杂情况下的抓取能力已经接近人类水平。


据团队介绍,机器人日常面对的都是大量堆叠的、复杂的、没有见过的物体,同时场景呈现极度的杂乱性,还没有相关研究可直接面对任意复杂场景进行抓取。这次联合实验室发布的最新算法就解决了这一行业痛点。据非夕市场高级经理韩晓璇介绍,经过不断的算法迭代,目前这套算法已经可以实现对透明、反光的物体进行抓取,扩大了自己的应用领域。
在AnyGrasp的帮助下,仅需要一台 1500 元的 RealSense 深度相机,即可在数十毫秒的时间内,得到其观测视野内整个场景的数千个抓取姿态,且均为六自由度,以及一个额外的宽度预测。

AnyGrasp的优势在于:对未曾见过、复杂场景中的任意物体均可抓取,包括刚体、可变形物体、无纹理的物体等,在数十毫秒内即可生成数千个稳定的抓取姿态,同时对背景、光照、桌面角度等不敏感,且无需高精度工业相机,千元价位的深度相机(如 Intel RealSense)即可胜任,成本较低。
据介绍,自适应机器人与先进AI算法的实际结合,不但有助于实验室在其算法的研究和应用层面进行更多尝试,同时有力助推了非夕对医疗、餐饮、服务等更多生活化领域的市场拓展。

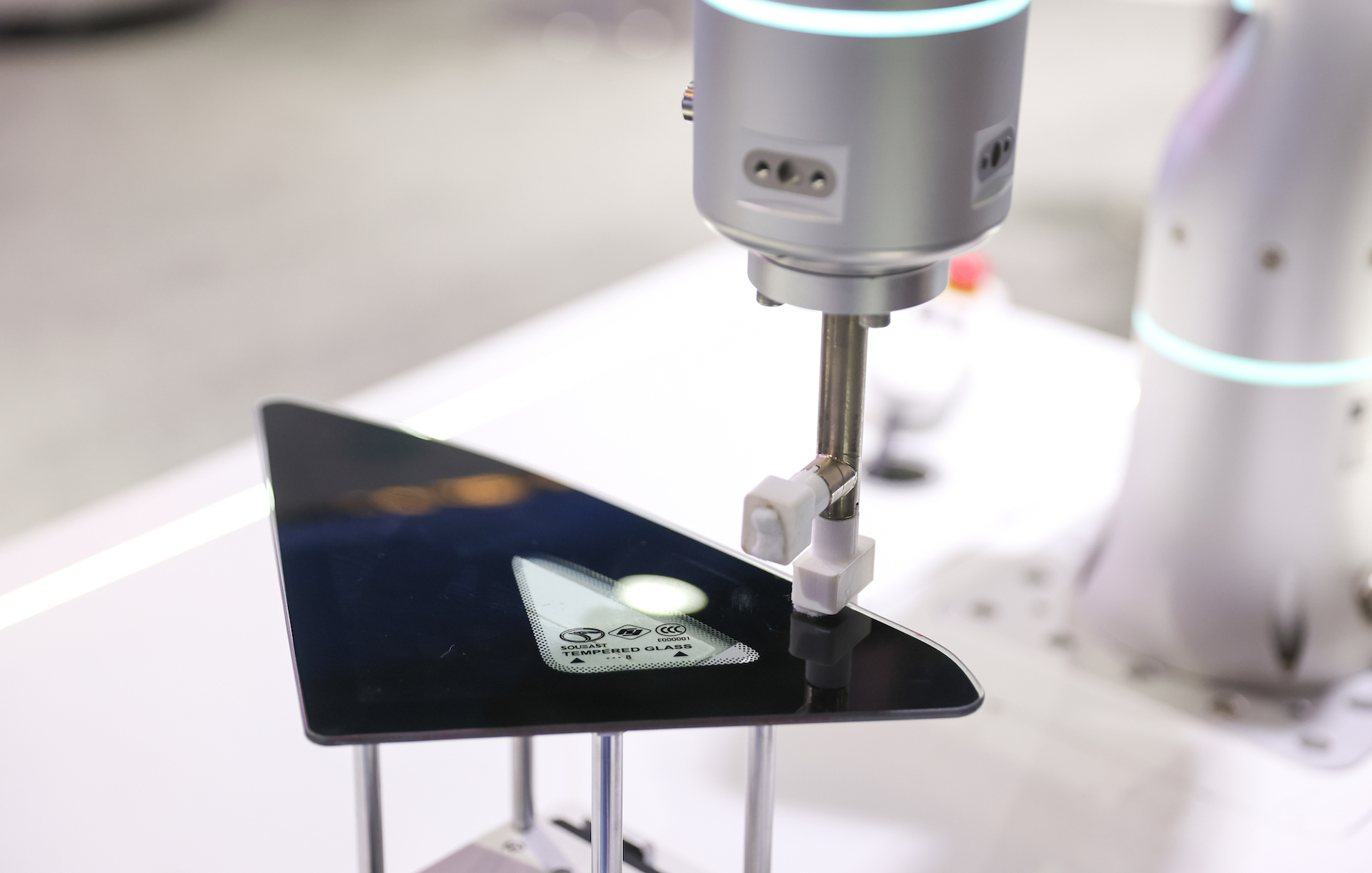
在非夕展台上,另一款高柔性汽车玻璃底涂解决方案也吸引了不少观众驻足询问。
底涂是工业领域中常见的一种预处理工艺,主要用于提高胶粘剂与基材的粘接强度。底涂工艺对曲面适应、误差兼容等要求高,因此目前自动化率较低;同时,底涂剂是一种复合化工原料,有一定毒性,这也造成了行业内劳动力流动性过大、招工成本高等问题。
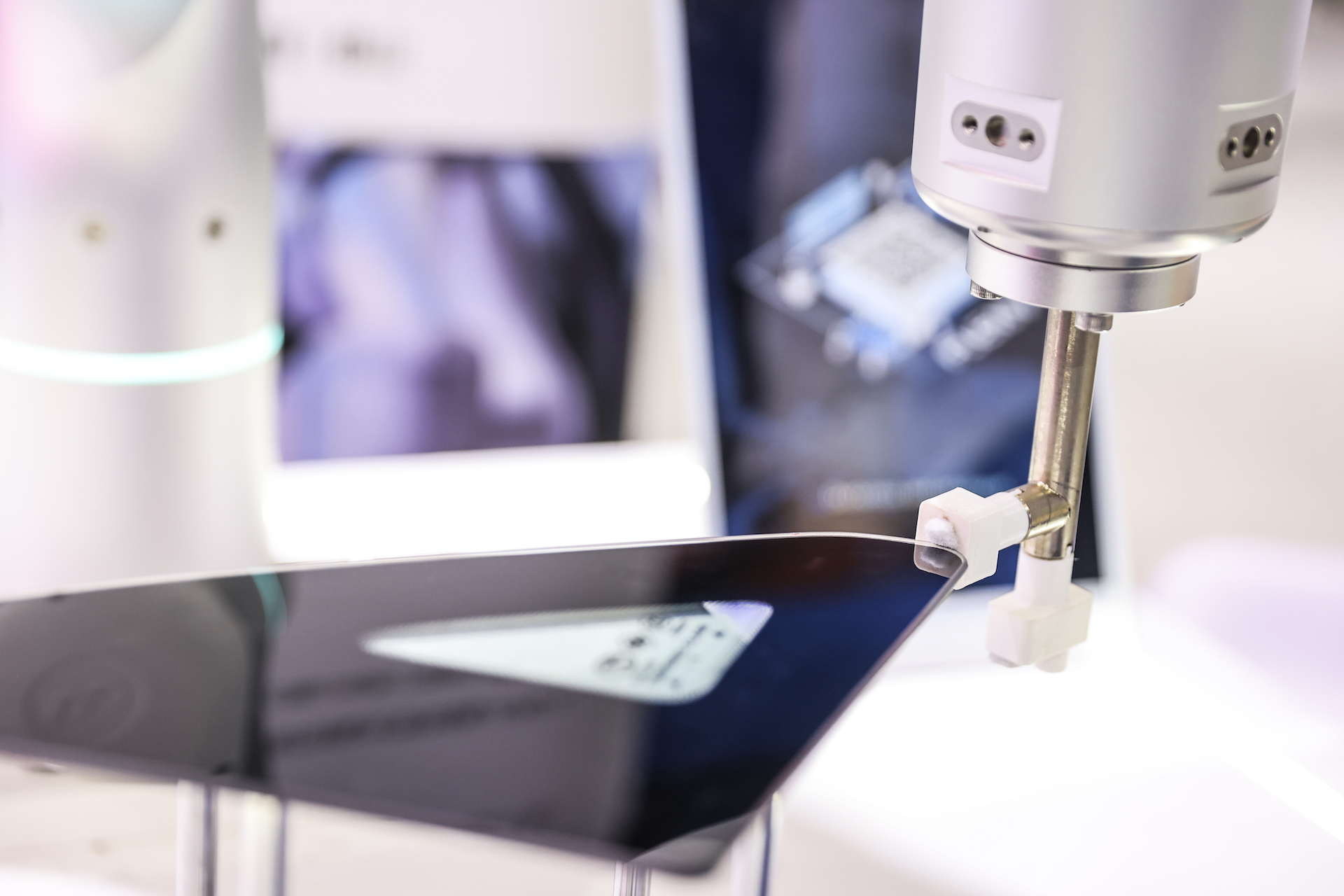

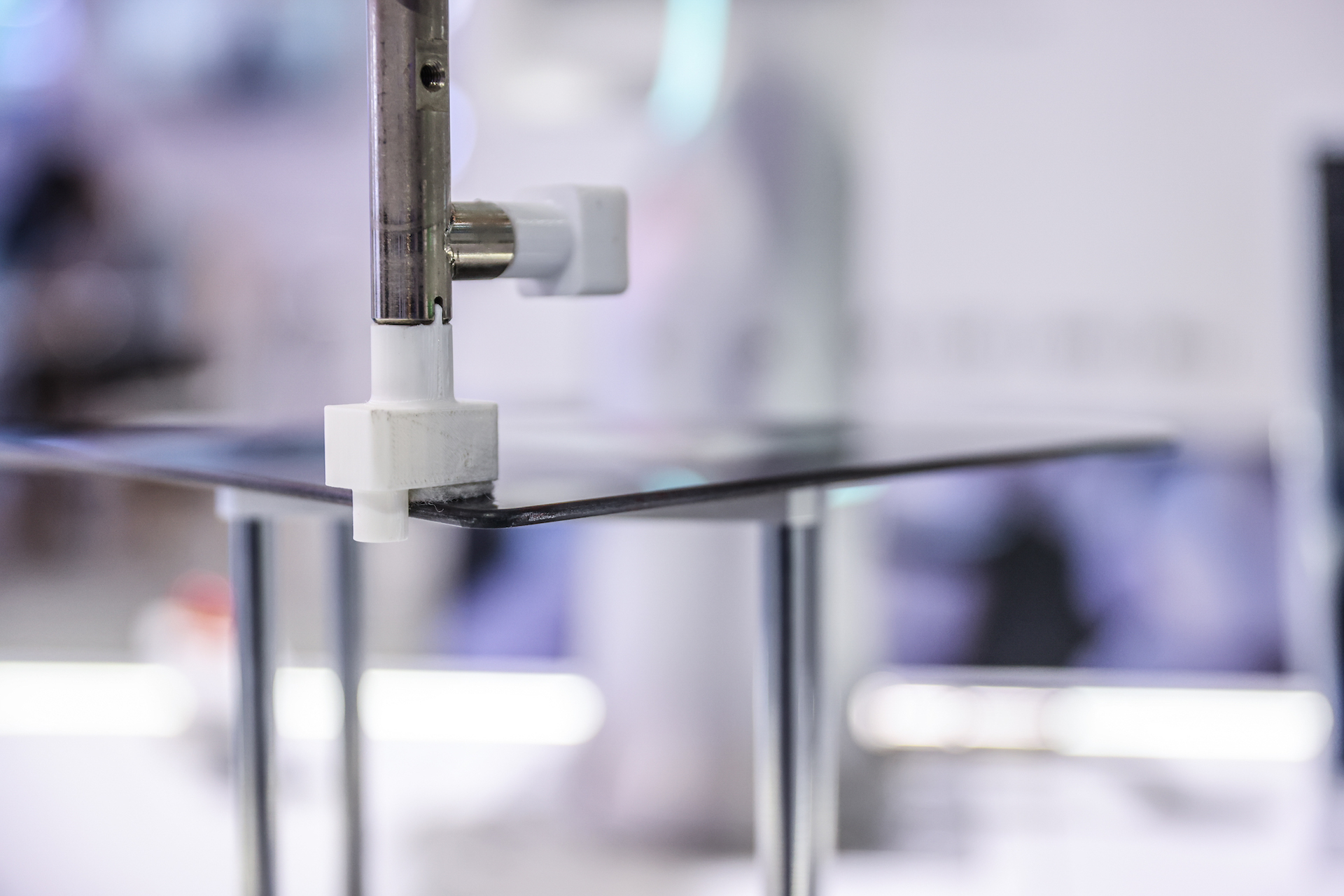
基于自身在汽车领域里的多年积累和自适应机器人的的高精度、高相应的力位复合控制能力,非夕科技推出了高柔性汽车玻璃底涂解决方案。该方案能有效容忍多种误差(位置误差、配合误差、工件加工误差等),自主施加恒力贴合玻璃边缘及大曲率的转角曲面,保证在宽度要求范围内的连续、完整、均匀的底涂成果。同时,底涂轨迹连续完整,轨迹宽幅、中心线位置误差均符合要求,良率可达97%及以上。

值得一提的是,该方案还具备部署便捷、柔性兼容的特点。具体来说,机整套方案无需点位示教,操作者可直接通过拖拽示教生成轨迹,操作简单、效率高;还能适应不同形状和尺寸的工件,非标工装治具及末端工具投入低,产品换型换线成本低,从而实现方案的快速部署和柔顺的产线切换。

在汽车领域,非夕科技此前已落地多项应用,包括复合移动自适应机器人新能源汽车自动充电应用、全球首条由自适应机器人构成的全自动汽车域控制器生产线等。目前这条产线已经成功在无锡客户现场交付,产线全部采用非夕科技自主研发生产的自适应机器人Rizon拂晓搭建,由机器人自主协同完成生产线的智能上料、涂胶、精密组装、检测、柔性化装配等一系列复杂工艺,在有效保证域控制器产品质量的同时,显著提升生产柔性。

非夕科技(Flexiv)是一家全球技术领先的通用智能机器人公司,专注于研发、生产集工业级力控、计算机视觉和人工智能技术于一体的自适应机器人产品,为不同行业的客户提供基于非夕机器人系统的整体、创新性的解决方案和服务。成立于2016年的非夕科技目前已完成B+轮融资,投后估值达独角兽级别。
作者:袁婧
编辑:王柏玲
责任编辑:王蔚
*文汇独家稿件,转载请注明出处。